The following program is tentative. Be careful if the program will be changed without any notification.
Overall schedule
September 16th evening:: Welcome reception
September 17th: Workshops (separate tracks)
September 18th: Main conference (single track)
September 19th: Main conference (single track)
September 20th: Main conference (single track)
Program in papercept
Notice: Poster presentation
The board size for posters is 1160 x 1750 mm (1140 x 1700 mm for presentation).
Therefore the committee recommend A0 size (841 x 1189 mm) with vertical orientation.
September 16 – Welcome Reception
18:00-20:00 Reception (17:00-20:00 Registration)
September 17 – Workshops/Tutorials
9:00-17:00 Registration
Understanding Developmental Disorders: From Computational Models to Assistive Technology
Organizers: Anja Kristina Philippsen, Yukie Nagai
Website: http://cognitive-mirroring.org/en/events/icdlepirob2018_workshop/
Active vision, Attention, and Learning
Organizers: Chen Yu, David Crandall
Website: http://vision.soic.indiana.edu/aval-2018/
Continual Unsupervised Sensorimotor Learning
Organizers:Nicolás Navarro-Guerrero, Sao Mai Nguyen, Erhan Oztop, Junpei Zhong
Website: http://conferences.au.dk/icdl-epirob-2018-workshop/
September 18 – Main conference
9:00-17:00 Registration
9:30 – 9:50 Welcome and Introduction
9:50 – 10:50 Keynote 1: Prof. Oliver Brock
Title: Developmental Theories of AI
Chair: Emre Ugur
10:50 – 11:15 Coffee Break
11:15 – 12:30 Session 1: Neural Networks
Chair: Xavier Hinaut
11:15 – 11:40 Talk 1: Michael Garcia Ortiz, Alban Laflaquière
Learning Representations of Spatial Displacement through Sensorimotor Prediction
11:40 – 12:05 Talk 2: Stefan Heinrich, Tayfun Alpay, Stefan Wermter
Adaptive and Variational Continuous Time Recurrent Neural Networks
12:05 – 12:30 Talk 3: Alexandre Antunes, Alban Laflaquière, Angelo Cangelosi
Solving Bidirectional Tasks Using MTRNN
12:30 – 14:00 Lunch (not provided)
14:00 – 15:00 Keynote 2: Prof. Kenji Doya
Title: What can we further learn from the brain for AI and robotics?
Chair: Tadahiro Taniguchi
15:00 – 15:25 Coffee break
15:25 – 16:40 Session 2: Action selection and learning
Chair: Yuji Kawai
15:25 – 15:50 Talk 1: Nino Cauli, Pedro Vicente, Jaeseok Kim, Bruno Damas, Alexandre Bernardino, Filippo Cavallo, José Santos-Victor
Autonomous Table Cleaning from Kinesthetic Demonstrations Using Deep Learning
15:50 – 16:15 Talk 2: Matthieu ZIMMER, Yann BONIFACE, Dutech Alain
Developmental Reinforcement Learning through Sensorimotor Space Enlargement
16:15 – 16:40 Talk 3: Jeffrey Frederic Queisser, Hisashi Ishihara, Barbara Hammer, Jochen J. Steil, Minoru Asada
Skill Memories for Parameterized Dynamic Action Primitives on the Pneumatically Driven Humanoid Robot Child Affetto
16:40 – 17:05 Coffee break
17:05 – 18:35 Poster session 1
Chair: Emre Ugur
Long posters
- Gianluca Baldassarre, Francesco Mannella, Vieri Giuliano Santucci, Eszter Somogyi, Lisa Jacquey, Mollie D. Hamilton, J. Kevin O’Regan,
Action-Outcome Contingencies As the Engine of Open-Ended Learning: Computational Models and Developmental Experiments - Melisa Idil Sener, Emre Ugur
Partitioning Sensorimotor Space by Predictability Principle in Intrinsic Motivation Systems - Alban Laflaquière
A Sensorimotor Perspective on Grounding the Semantic of Simple Visual Features - Chie Hieida, Takato Horii, Takayuki Nagai
Toward Empathic Communication: Emotion Differentiation Via Face-To-Face Interaction in Generative Model of Emotion - Alexander Schulz, Jeffrey Frederic Queisser, Hisashi Ishihara, Minoru Asada
Transfer Learning of Complex Motor Skills on the Humanoid Robot Affetto - Xingxing Guo, Quan Liu, Jie Zuo, Wei Meng, Qingsong Ai, Zude Zhou
A Novel Pneumatic Artificial Muscle -Driven Robot for Multi-Joint Progressive Rehabilitation - Anja Kristina Philippsen, Yukie Nagai
Understanding the Cognitive Mechanisms Underlying Autistic Behavior: A Recurrent Neural Network Study - Namiko Saito, Kitae KIM, Shingo Murata, Tetsuya Ogata, Shigeki Sugano
Detecting Features of Tools, Objects, and Actions from Effects in a Robot Using Deep Learning
Short posters
- Arkadiusz Bialek, Joanna Rączaszek-Leonardi, Semiotic Relations As Controls of Interactions
- Xianwei Meng, Kazuhide Hashiya, Spontaneous Communication Based on the Understanding of Others’ Epistemic States in 1.5-Year-Old Human Infants
September 19: Main conference
9:00-17:00 Registration
9:30 – 10:30 Keynote 3: Prof. Peter J. Marshall
Title: Embodiment and Human Development
Chair: Angelo Cangelosi
10:30 – 10:55 Coffee break
10:55 – 12:10 Session 3: Architectures
Chair: Takato Horii
10:55 – 11:20 Talk 1: Cristina Melicio, Ana Filipa Almeida, Rui Figueiredo, Alexandre Bernardino, José Santos-Victor
Object Detection and Localization with Artificial Foveal Visual Attention
11:20 – 11:45 Talk 2: Paresh Dhakan, Kathryn Elizabeth Merrick, Inaki Rano, Nazmul Haque Siddique
Modular Continuous Learning Framework
11:45 – 12:10 Talk 3: Md Mohiuddin Khan, Kathryn Elizabeth Merrick, Michael Barlow
Intrinsically Motivated Agent Behavior in a Swarm
12:10 – 14:00 Lunch (not provided)
14:00 – 15:15 Session 4: Body schema
Chair: Tetsunari Inamura
14:00 – 14:25 Talk 1: Rodrigo Zenha, Pedro Vicente, Lorenzo Jamone, Alexandre Bernardino
Incremental Adaptation of a Robot Body Schema Based on Touch Events
14:25 – 14:50 Talk 2: Nina-Alisa Hinz, Pablo Lanillos, Hermann Müller, Gordon Cheng
Drifting Perceptual Patterns Suggest Prediction Errors Fusion Rather Than Hypothesis Selection: Replicating the Rubber-Hand Illusion on a Robot
14:50 – 15:15 Talk 3: Yihan Zhang, Yukie Nagai
Proprioceptive Feedback Plays a Key Role in Self-Other Differentiation
15:15 – 15:30 Coffee break
15:30 – 17:00 Poster session 2:
Chair: Emre Ugur
Long posters:
- Jacques Kaiser, Gerd Lindner, Juan Camilo Vasquez Tieck, Martin Schulze, Michael Hoff, Arne Roennau, Rüdiger Dillmann
Microsaccades for asynchronous feature extraction with spiking networks - Dingsheng Luo, Mengxi Nie, Tao Zhang, Xihong Wu
Developing Robot Reaching Skill with Relative-Location based Approximating - Ahmet Tekden, Emre Ugur, Yukie Nagai, Erhan Oztop,
Modeling the Development of Infant Imitation Using Inverse Reinforcement Learning - Maxime Petit, Amaury Depierre, Xiaofang Wang, Emmanuel Dellandrea, Liming Chen
Developmental Bayesian Optimisation of Black-Box with Visual Similarity-Based Transfer Learning - YUHENG WU, Kuniyuki Takahashi, Hiroki Yamada, Kitae KIM, Shingo Murata, Shigeki Sugano, Tetsuya Ogata
Dynamic Motion Generation by Flexible-Joint Robot Based on Deep Learning Using Images - JIEXIN WANG, Stefan Elfwing, Eiji Uchibe
Deep Reinforcement Learning by Parallelizing Reward and Punishment Using MaxPain Architecture - Qingsong Ai, Lei Wang, Kun Chen, Anqi Chen, Wei Meng, Quan Liu, Zude Zhou
Cooperative Control of an Ankle Rehabilitation Robot Based on Human Intention
Short posters:
- Semih Korkmaz, Erhan Oztop,
Effect of Resource Limitation on Robotic Imitation: Predictions for Infant Imitation Learning - Masanori Yamaguchi,
The Development of Peer Interaction and Understanding False Beliefs in Young Children
17:00 – 17:50 Session 5: Babybot Challenge
Chair: Erhan Oztop
17:00 – 17:25 Talk 1: Yuji Kawai, Tomohiro Takimoto, Jihoon Park, Minoru Asada
Efficient Reward-Based Learning through Body Representation in a Spiking Neural Network
17:25 – 17:50 Talk 2: Julien Abrossimoff, Alexandre Pitti, Philippe Gaussier
Visual Learning for Reaching and Body-Schema with Gain-Field Networks
17:50-18:00 Announcement of ICDL-Epirob 2019
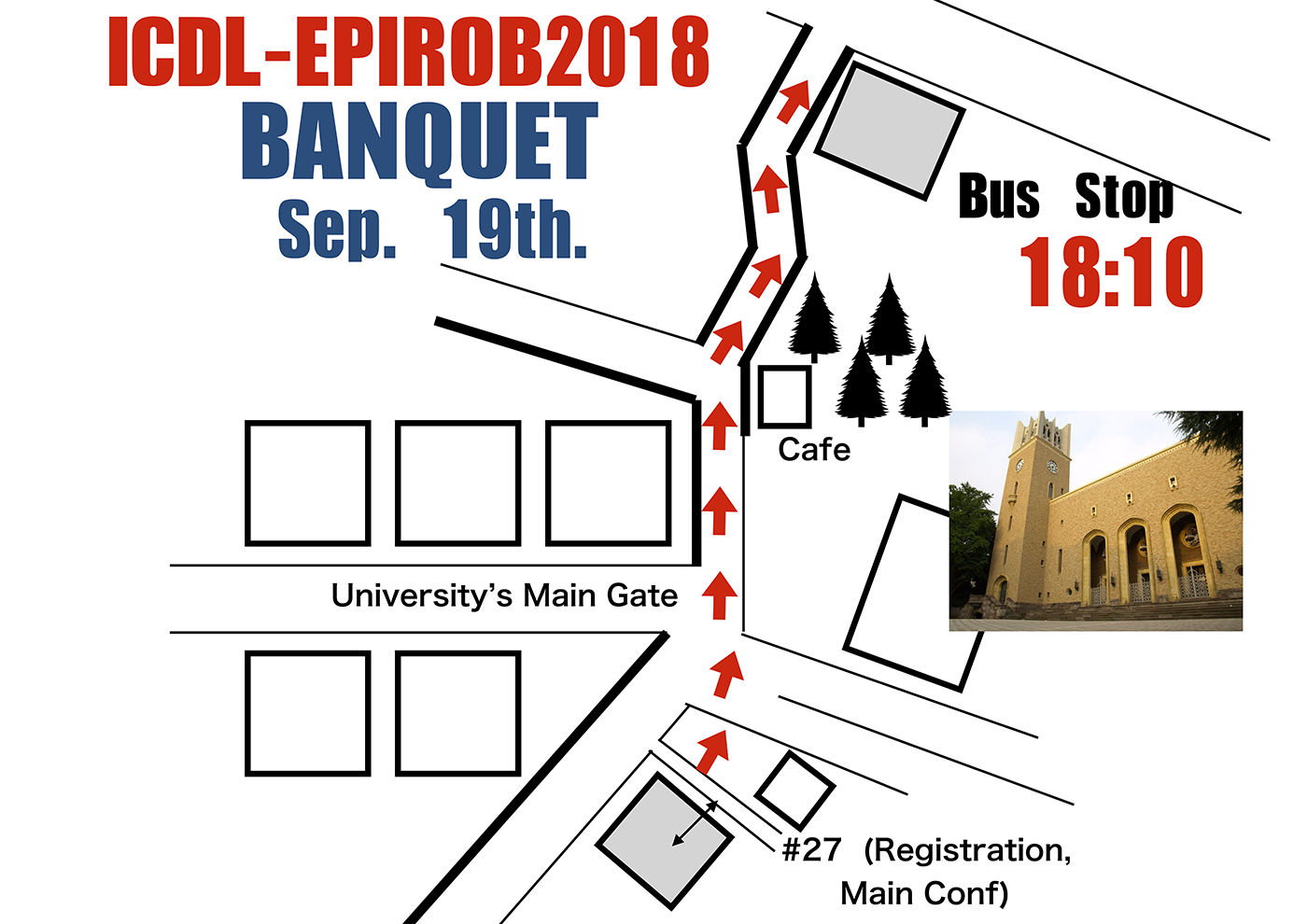
18:30 Buses: We reserved buses from our conference site to go to the boat pier for the banquet
19:30-22:00 Banquet: Japanese Traditional Yakatabune cruise
Place: Harumi Asashio Boat pier, 3-1-1 Harumi , chuo-ku , Tokyo.
5 minutes from Exit A3 of Kachidoki Station on the Toei Oedo line.
There will be Buses for backing to conference site.
The route to a bus stop for the banquet.
September 20: Main conference
9:00-17:00 Registration
9:30 – 10:30 Keynote 4: Mr. Masahiro Fujita
Title: AIxRobotics in Sony
Chair: Tetsuya Ogata
10:30 – 10:55 Coffee break
10:55 – 12:10 Session 6: Social Learning
Chair: Yukie Nagai
10:55 – 11:20 Talk 1: Matthias Rolf, Nigel Crook, Jochen J. Steil
From Social Interaction to Ethical AI: A Developmental Roadmap
11:20 – 11:45 Talk 2: Junko Kanero, Idil Franko, Cansu Oranç, Orhun Uluşahin, Sümeyye Koşkulu, Zeynep Adıgüzel, Aylin C. Küntay, Tilbe Göksun
Who Can Benefit from Robots? Effects of Individual Differences in Robot-Assisted Language Learning
11:45 – 12:10 Talk 3:Vicky Charisi, Cynthia C. S. Liem
Novelty-Based Cognitive Processes in Unstructured Music-Making Settings in Early Childhood
12:10 – 14:00 Lunch (not provided)
14:00 – 15:15 Session 7: Language learning
Chair: Michael Spranger
14:00 – 14:25 Talk 1: Tadahiro Taniguchi, Yuta Fukusako, Toshiaki Takano
Bayesian Noisy Word Clustering Via Sampling Prototypical Words
14:25 – 14:50 Talk 2: Joanna Rączaszek-Leonardi, Terrence Deacon
Ungrounding Symbols in Language Development: Implications for Modeling Emergent Symbolic Communication in Artificial Systems
14:50 – 15:15 Talk 3: Ryo Ozaki, Tadahiro Taniguchi,
Accelerated Nonparametric Bayesian Double Articulation Analyzer for Unsupervised Word Discovery
15:15 – 15:40 Coffee break
15:40 – 17:10 Poster session 3:
Chair: Emre Ugur
Long posters:
- Murat KIRTAY, Lorenzo Vannucci, Egidio Falotico, Cecilia Laschi
Multimodal Sensory Representation for Object Classification Via Neocortically-Inspired Algorithm - Qingpeng Zhu, Chong ZHANG, Jochen Triesch, Bertram Emil Shi
Autonomous learning of cyclovergence control based on Active Efficient Coding - Claus Lang, Guido Schillaci, Verena Vanessa Hafner
A Deep Convolutional Neural Network Model for Sense of Agency and Object Permanence in Robots - Antonio Pico Villalpando, Guido Schillaci, Verena Vanessa Hafner
Predictive Models for Robot Ego-Noise Learning and Imitation - Silvia Pagliarini, Xavier Hinaut, Arthur Leblois
A Bio-Inspired Model towards Vocal Gesture Learning in Songbird - Miki Hirabayashi, Hirotada Ohashi
Critical Brain Hypotheses on the Emergence of Cognitive Functions in Simple Circuits for Backward Time Perception - Xavier Hinaut
Which Input Abstraction Is Better for a Robot Syntax Acquisition Model? Phonemes, Words or Grammatical Constructions?
Short posters:
- Julian Zubek, Arkadiusz Bialek, Martyna Jackiewicz, Klaudia Adamik
Theory of Mind and Movement Synchrony - Eiji Uchibe
Cooperative and Competitive Reinforcement and Imitation Learning
17:10 – 17:30 Closing & award ceremony